Mathcad ® Enabled Content Copyright © 2011 Trieru Ltd. ( www.trie.ru )
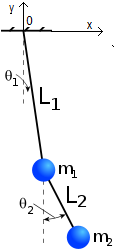
Double Pendulum
Created by Valery Ochkov ( http://twt.mpei.ac.ru/ochkov/v_ochkov.htm )
1-st pendulum
2-nd pendulum
Initial position (x1-y1), force (F1) and velocity (x1'-y1')
System of equation
Initial position (x2-y2), force (F2) and velocity (x2'-y2')
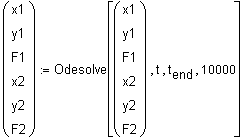
Solution
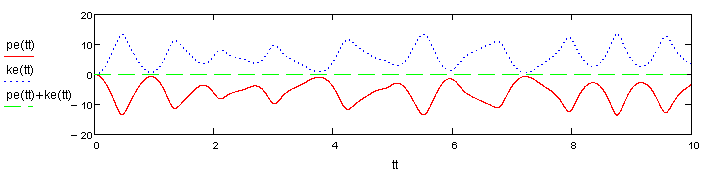
Data for the plot below
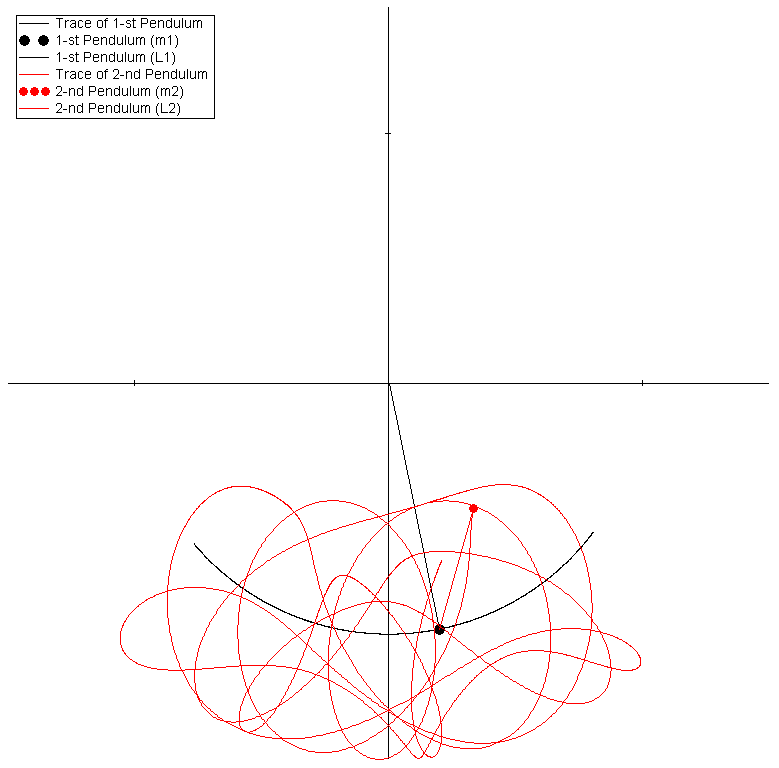
Change the FRAME value (1-700) manually and see the picture bellow.
Or delete the yellow operator bellow and change by an animation creating (Tools/Animation/Record) the FRAME value from 1 to 700.
Created by Valery Ochkov