| ОГЛАВЛЕНИЕ | ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ | ПОЛЕЗНЫЕ ССЫЛКИ |
Элементарная математика

 Радиус вектор точки. Угол в тригонометрии
Радиус вектор точки. Угол в тригонометрии
Тригонометрические функции и их свойства
 Определение тригонометрических функций
Определение тригонометрических функций
Значения тригонометрических функций
Основные свойства тригонометрических функций
Свойства функции y = sin x и ее график
Свойства функции y = cos x и ее график
Основные формулы тригонометрии
Основные тригонометрические тождества
Тригонометрические функции суммы и разности углов (формулы сложения)
Тригонометрические функции двойных и тройных углов
Формулы понижения степени (тригонометрические функции половинных углов)
Преобразование суммы или разности тригонометрических функций в произведение
Преобразование произведений тригонометрических функций в сумму или разность
Выражение тригонометрических функций через тангенс половинного аргумента
Обратные тригонометрические функции (аркфункции) и их свойства
Значения обратных тригонометрических функций часто встречающихся углов
Решение тригонометрических уравнений
Понятие тригонометрического уравнения
Простейшие тригонометрические уравнения и формулы их решений
Тригонометрические уравнения, содержащие тригонометрические функции с одним и тем же аргументом
Тригонометрические уравнения, рациональные относительно sin x и cos x. Универсальная подстановка
Тригонометрические уравнения, содержащие тригонометрические функции с разными аргументами
Уравнения, левая часть которых разлагается на множители, а правая равна нулю
Простейшие тригонометрические неравенства
![]()
![]() В тригонометрии углом считают меру поворота подвижного радиус-вектора относительно его начального положения. Приведем необходимые понятия. Рассмотрим декартову систему координат Oxy.
В тригонометрии углом считают меру поворота подвижного радиус-вектора относительно его начального положения. Приведем необходимые понятия. Рассмотрим декартову систему координат Oxy.
Радиус-вектором точки M называется вектор, началом которого является начало O системы координат, а концом – точка M (обозначение:
r = OM). Длиной радиус-вектора OM называется длина отрезка OM (обозначение: | r | = r = | OM|).
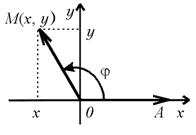
Будем вращать радиус-вектор OM вокруг точки O.![]() Положение OA этого вектора, которое совпадает с положительным направлением оси Ox, назовем начальным положением радиус-вектора OM, а сам радиус-вектор
Положение OA этого вектора, которое совпадает с положительным направлением оси Ox, назовем начальным положением радиус-вектора OM, а сам радиус-вектор
OM – подвижным радиус-вектором.
Говорят, что вектор OM образует со своим начальным положением OA угол
![]() ,
,
если вектор OM, начиная от положения OA, сделав n полных оборотов против часовой стрелки, повернулся еще на угол в ![]() градусов в том же направлении.
градусов в том же направлении.
Если же вектор OM, начиная от своего начального положения OA, сделал n полных оборотов по часовой стрелке и повернулся еще на угол в ![]() градусов в том же направлении, то говорят, что угол между вектором OM и его начальным положением OA равен
градусов в том же направлении, то говорят, что угол между вектором OM и его начальным положением OA равен
![]()
Таким образом, при вращении подвижного радиус-вектора OM против часовой стрелки получаются положительные углы, а при вращении по часовой стрелке – отрицательные углы.